
微创机器人外科及触觉感知
微创机器人外科及触觉感知国家自然科学基金课题
项目简介:
微创机器人外科及触觉感知国家自然科学基金课题
微创外科(MIS)与开放外科手术相比,具有切口小、疼痛轻、出血少和恢复快等优点,广泛应用于胸腹、脊柱、心血管和泌尿外科等领域
微创机器人外科(MIRS)由机器人替代医生操控手术器械,克服医生人为因素带来的风险,提高手术的安全性和灵巧性,改善手术精度和质量
触觉力信息缺失导致过大的操作力和器官组织创伤,是当前微创机器人外科面临的共同问题。项目利用光纤技术,研究微型触觉力传感器及其在器官组织类型和边界鉴定、机器人反馈控制应用中涉及到的一系列挑战性问题。获得的相关理论与技术,有望消除触觉缺失引起的手术风险,提高微创机器人外科手术的精度、稳定性和质量。
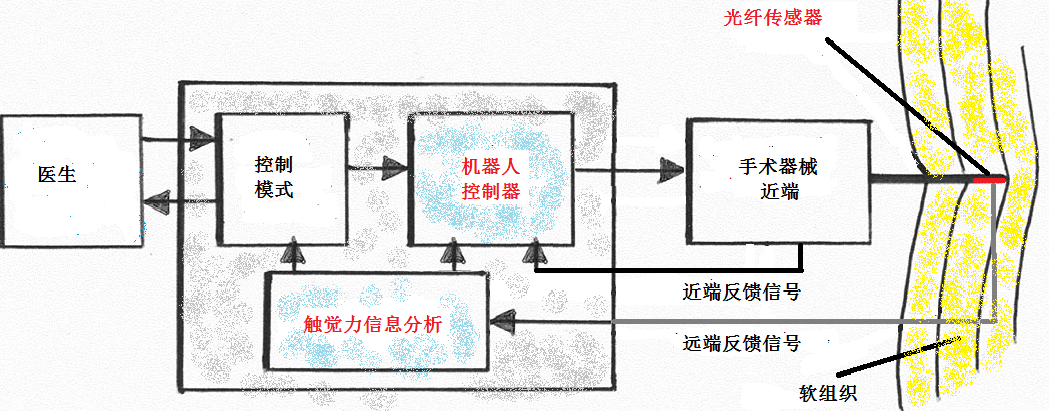
微创外科图示
控制系统如下图所示。术前规划的任务是在笛卡尔空间生成机器人末端参考路径、速度和加速度。相互作用模型则利用在线位置和力反馈,计算理想的操控力,模型相关参数由软组织类型和边界鉴定结果调整。整个机器人力控外环的输出,即任务空间的理想加速度,经逆运动学转换成为内环关节位置控制的输入。
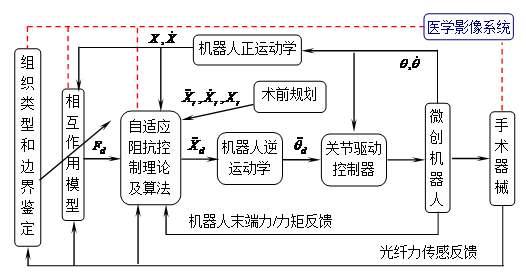 控制系统
控制系统



