
HIT6503高精度伺服运动控制器
为解决数控技术的核心部分过分依赖国外的问题,由原航天工业部资助,历时三年的时间成功地开发了 HIT6503型精度伺服运动控制器,并于1997年荣获航天工业部科技进步三等奖。
项目简介:
为解决数控技术的核心部分过分依赖国外的问题,由原航天工业部资助,历时三年的时间成功地开发了 HIT6503型精度伺服运动控制器,并于1997年荣获航天工业部科技进步三等奖。
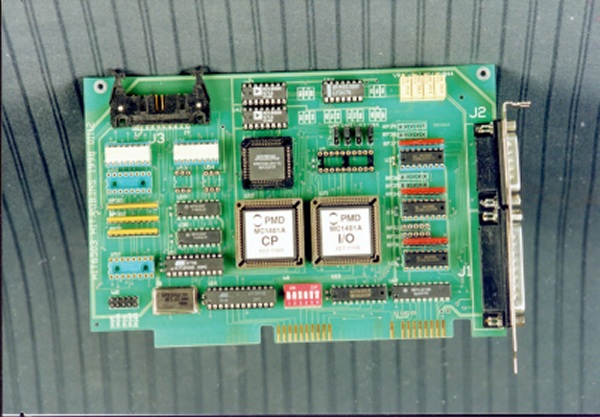
由于采用数字信号处理器MC1401片组及可编程逻辑器件,该控制器具有较高的集成度,并可提供极其精细的控制输出;变加速控制使系统的起停更平稳;内置的速度前馈控制可显著地改善系统的动态性能。该控制器采用增量式编码器(或光栅尺),具有可选择的控制输出(DAC输出或PWM输出),可用于交、直流伺服电机或液压、气动伺服控制。
主要技术指标:
S形、梯形曲线位置控制或梯形曲线速度控制;
32位位置、速度、加速度和加速度导数寄存器;
PID+速度前馈控制算法(可在线修改);
电子齿轮功能;
位置误差超限自动停止功能;
零位位置捕捉及自动归零功能;
采样时间100微秒/轴;
16位DAC或10位PWM(24.5kHz)输出。
应用范围:
该控制器可广泛应用于机器人、数控机床等高精度调速系统及编码器或光栅尺数显等系统。目前,该控制器已成功用于哈尔滨工业大学、上海交大、深圳大学、清华大学、核工业部武汉所等多家单位的数控相关项目,并且在系统改造中有广泛的应用前景.



